Announced Projects

Ethos – Adaptive Radiotherapy
This entry is special to me. It’s not about my studies, personal projects, or family. It’s about a revolutionary product that I had the privilege to help develop alongside over 100 other engineers: ETHOS – Adaptive Radiotherapy. ETHOS is the world’s first adaptive radiotherapy system. As some of you may know, radiotherapy is one of the three primary ways to treat cancer, alongside chemotherapy and surgery. It’s the only local, non-invasive method for treating tumors. Varian has a history of innovation in cancer treatment, contributing technologies like IMRT (Intensity-modulated radiation therapy), IGRT (Image-guided radiation therapy), and Rapid Arc. So, what makes ETHOS so revolutionary? ETHOS largely eliminates the need for these error margins. It’s the first system to utilize artificial intelligence to create treatment plans based on the patient’s current anatomy. This means the plans are adapted to the patient’s actual structure at the time of treatment. Remarkably, these complex calculations are performed within a typical treatment time slot! This technology is poised to revolutionize cancer treatment. I was fortunate enough to be part of this project, even traveling to Denmark to oversee the installation of the world’s first clinical setting at Herlev Hospital. We successfully treated the first patients that same week! This achievement culminated in its unveiling at ASTRO 2019 in Chicago, USA, garnering worldwide news coverage:
- Varian to Equip ETHOS Personalized Adaptive Therapy System
- Varian’s Adaptive Therapy Provides Opportunity to Transform Radiation Oncology
- Varian Receives FDA 510(k) Clearance for Ethos Therapy
A concise summary is provided by Dr. David Sjostrom, deputy chief physicist at Herlev Hospital, in an interview with ITN Online.
Clash of Balls
Clash of Balls is an Android multiplayer game with 1000+ installs, which was done during a semester project for the course Distributed Systems @ ETHZ by me, Beat Küng and Andrin Jenal. Each player controls a ball and tries to push the others down into the void. Levels are configurable and can be self-made. It uses the AllJoyn library for peer-to-peer communication. So no server is used, but each player needs to be in the same network to see eachother. If the device supports it, Clash of Balls should also run via Bluetooth. For physics simulation, JBox2D is used, a Java implementation of the 2D physics engine Box2D. It uses the zlib license. The source code can be found here


Mission Trip – Satipo
After finishing my military service, I embarked on a two-month trip to Peru with Micha Baumann. During that time, we spent just over a week volunteering and visiting “Sopita,” a social work organization in Satipo. It was an incredibly revealing experience. Initially, I felt pity for the people there. They lacked things I considered basic: good restaurants, stable internet, sturdy home furnishings, and even political stability. Yet, the longer I stayed, the more I realized how much my own happiness was dependent on external factors. A false sense of security in my life—the illusion that I had a right to be happier simply because I lived in Europe, despite the constant unpredictability of life—began to crumble. This trip was a life-changer. Not because the concepts were new to me, but because it was the first time I truly experienced them. There’s a significant difference between knowing something and truly understanding it. Report to the trip can be found here.
Augmented Reality – LARA
During my year working abroad for Arteries, I was entrusted with the lead role for the development of a cutting-edge marketing application that integrated augmented reality for Android devices. This project, known today as LARA AR, was a significant learning experience, allowing me to refine my skills in cross-platform development and mobile AR integration. Leading this project involved overseeing the entire development lifecycle, from initial concept and design to implementation, testing, and deployment. It presented various challenges, including optimizing AR performance on diverse Android hardware, integrating complex 3D models, and ensuring a user-friendly interface for marketing purposes.
You can visit the project’s official website to learn more and see their innovative work, and explore their YouTube channel to watch demonstrations of LARA AR in action. This experience not only honed my technical leadership skills but also provided invaluable insights into the rapidly evolving field of augmented reality development.


BKK Futar (now BudapestGO)
While in Budapest, I prototyped and developed the first Android version of BKK – Futar, now a widely used public transport app in the city. A key learning experience was creating a paper prototype to contrast with the client’s design, which, while based on competitor analysis, proved to be crowded and unintuitive. This hands-on demonstration effectively illustrated the difference between theoretical design and practical user experience. It’s worth noting that the initial version I developed in 2014 differs significantly from the current app, a testament to the continuous development over the past years.
Project Bangladesh: A Journey of Impact
It’s been over seven years since Project Bangladesh began. Thanks to the incredible contributions of many individuals, we’ve successfully established several schools, supported numerous families, and fed dozens of children for years. Beyond that, we’ve been able to provide crucial financial support to local co-workers, ensuring they don’t have to choose between their own survival and that of the children they serve. While many good things have happened, there have also been challenges.
Unfortunately, due to various life changes among our main European donors, the project entered a critical phase. My own job required me to move to another city, and there was no one available to take over project coordination within our main church. This difficult situation led me to sadly conclude our collaboration.
At this point, I want to sincerely thank George for all his hard work and the impressive progress we achieved together. While my journey with this project ends here, I wish you and the team all the best and hope this project continues to thrive long after we both are gone. If you would like to contribute to the project, visit their website here.

Publications
Comparative Evaluation of Hand-Crafted and Learned Local Features
Matching local image descriptors is a key step in many computer vision applications. For more than a decade, hand-crafted descriptors such as SIFT have been used for this task. Recently, multiple new descriptors learned from data have been proposed and shown to improve on SIFT in terms of discriminative power. This paper is dedicated to an extensive experimental evaluation of learned local features to establish a single evaluation protocol that ensures comparable results.
Under the supervision of Prof. Pollefeys and advises of Dr. Schönberger this was the first time that state-of-the-art hand-crafted descriptors were directly compared to learnt ones, which led to a paper published in the Conference for Computer Vision and Pattern Recognition (CVPR) 2018 which has been cited over 300+ times since. Source code can be found here.

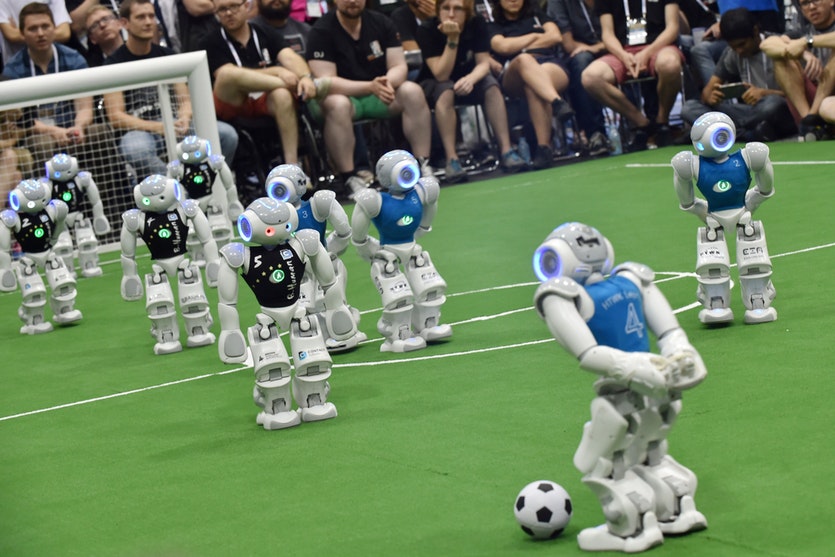
Conditional Random Fields for joint ball
and opponent detection, and
self-localization
In the Robocup, understanding the current scene is crucial for employing complex strategies. In a previous semester project, Martin Utz presented an approach to robot self-localization using Conditional Random Fields (CRFs), claiming it to be both accurate and fast. This thesis expands upon that CRF to include the detection of the ball and opponents. We demonstrate that jointly modeling self-localization with ball and opponent detection significantly improves overall estimation. Compared to the previous algorithm, the new algorithm shows improvement in the mean error of the robot’s estimated rotation, while recovery from being ‘kidnapped’ remains under 0.3 seconds. The computational cost of MAP inference in the CRF was halved, allowing it to be executed on the robot at 60 Hz. A series of experiments demonstrate that the achieved accuracy is satisfactory. This is the abstract of the bachelor thesis I wrote for the CVL @ ETHZ. Supervised by Prof. Dr. Luc van Gool and advised by MIT post-doctoral fellows Xavier Boix and Gemma Roig, this was my first major robotics project in a large group. The thesis can be downloaded here.
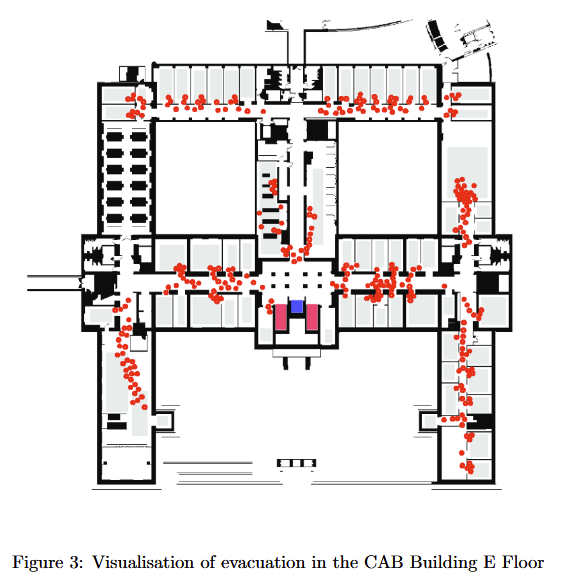
Modelling Situations of Evacuations
For this work, Andrin Jenal, Beat Küng, Felix Thaler, and I collaborated to create a program capable of determining the optimal exit paths within various building layouts. We addressed this intricate problem by implementing a 2D Range Tree data structure, which not only improved access to the forces influencing each agent but also enabled efficient evacuation simulations.
A key differentiator for our project was our emphasis on both efficiency and realistic program implementation. For instance, our pre-processing phase leverages the Fast Sweeping Algorithm Method, significantly reducing initialization time to just a few seconds, a notable improvement over the minutes typically required by the Fast Marching Algorithm (refer to Section 5 of our report for details). Additionally, our proprietary 2D Range Tree data structure is adept at handling a large volume of agents, facilitating the simulation of extensive multi-level buildings using a robust force model.
The report and code are available here.